�����֮���Ĵ�����ļ������������ļ�������
���̽���ĿƼ��˳��У���֮���ĺ��ļ���ʼ����֧����ˮ������װ����չ�Ĺؼ�֧������ǰ��������dz�ἰ��֮���Ĵ�����ϵ�Ļ���������δ����������������ں���ս�Լ�ֵ�����죬���ǽ�ȫ��ҿ���������ɴ����ϸ����Ĵ���ļ�������ľ�����ָ�������ںˣ���������̽��Ϊ����֮��ʼ�ռᶨͶ���з���Դ����ڴˡ����ⲻ�����ƽ������������ս��ͻ����ҵ����ƿ���ı�Ȼѡ��Ҳ���Լ������������ҵ���������κ��ľ�������ս�Բ��֣�������֮����Ϊˮ������װ����ҵ�Ŀ����ߺ������ߵ���ʷʹ����

������Ϊһ����½�ء���ս�Ȼ��ͬ���������ʣ�����صĻ������ԡ������ˮѹ���Լ�ǿ�����������Ŷ�������ǿ��ʴ�ԡ���Ų��Ŀ���˥�������ŵ��ĸ��Ӷ�䡪����ͬ������ˮ��̽������ҵ�ĸ����Լ������ݡ�ˮ�»�������Ϊ���������һ����ĺ������壬�䷢չˮƽֱ��ȡ���ڶ�������ս��ϵͳ������������
���2030������г���140����Ԫ�Ĺ���ǰ������֮��ʼ�ռ�ּ�����������������ͻ�Ƶ���Ƭ���з�·���������ڹ���һ������������ơ���������Դ�����ܿ��������칤�յ�����������ϵ��������������γ��Ĵ����ϡ�Эͬ�ݽ��Ĺؼ�������ϵ���Դ˶���ˮ������װ�������ܱ߽���δ������
һ��ˮ�»�����ϵͳ���弼�������ˡ����ؼ���Լ���µ�ϵͳ�Ż�������
ˮ�»�����������ڶ��ؼ���Լ���µ�ϵͳ�Ż����⡣������ˮ���200������6000��ʱ�����ˮѹ��ʹ��Ч�غ���װ������֮�ȴ�40%���������10%���������������������빦��Ԥ���ڣ����ɶ��������ơ����С���ҵ��ʮ����߸��Ӷ���ϵͳ����ȷ�����ڸ�ѹ��ǿ��ʴ�����µ�Эͬ���ȶ����Ƕ�ϵͳ�����������ռ����顣
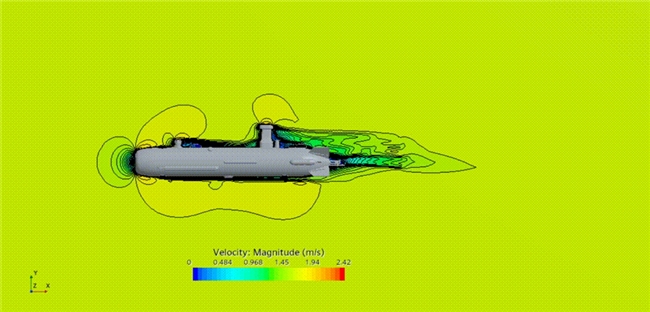
��֮����������ϵͳ��Ʒ������ᴩ��ָ��ֽƽ̨ʵ�ֵ�ȫ���̡�����������ҵ��������������������ˮ�»�������ʽ��ѡȡ���ŵ���ҵģʽ��ͨ�����嶯��ѧ(CFD)����������嶯��ѧ�����Ż�������Ƚ��ͺ�������������ʵ���˸���/����˫ģ̬�˶����ͣ���չ�˵�һƽ̨����ҵ��ϵ���з���ROV�붯���м���(����TMS)���Ͽ������Ƽ�������Ч����������µĶ���ѧ�Ŷ��������ġ�������ˮ�»�����롰���衱AUV�칹Эͬ���磬ͨ���ֲ�ʽ����滮��ֲ�ʽ���ߣ�ʵ���˹���ʱ����ά�ȵ�Эͬ��̽��ROVϵͳ�߱�6000�������ҵ�����Խ�Ŀ����������������ѳ�Ϊ����С���Դ��̽�ı�����ҵƽ̨�����ˮ�������з���ȫ�Զ��Dz�����ϵͳ��ʵ���˵��ճ�200�O������Ч����100%�IJ��������ʣ���ϵͳ����˼ά������ض���ҵ�Ļ�����Ч��ʹ�㡣
����ˮ�¶�������Դ������ͻ�ơ�����������������ƿ����
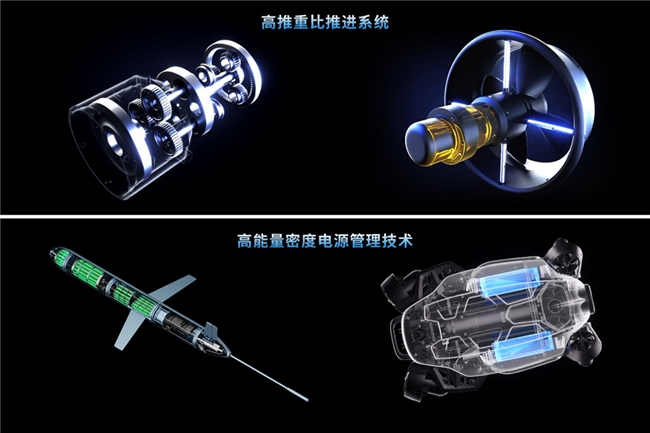
��������Դ������ˮ�»����������졢��Զ������Ч���ĺ���ƿ������ǰ�绯ѧ���ܵ������ܶ������������������㳤��ʱ��������ͬʱ���ƽ�ϵͳ�����ڡ���Ч�ʡ��롰��������֮�����Ȩ�⣬�������������������ṹ���������ظ���������ѧ�豸����Ӱ�캣����̬�����Ĺ۲���ʵ�ԡ�
��֮���۽��ڸ������ܶȵ�Դ��������������ر��ƽ�ϵͳ�������з���ͨ����ѹֱ��ROV���߹���͵�Դ�Ż������������������Ч�ʣ�ͨ���Ե�о�ľ�ѡ���ɿ��ܷ������ܹ�����ʵ��ˮ�����������ˮ�¸�Ч�Ϳɿ����������ƽ�������ϣ������з���ϵ�и�Ч�����������������ʸ���ƽ�ϵͳ��Vaporϵ��רҵװ����������·�Ż���ʵ����21kg������2.5m/s����ҵ��������ָ�ꡣROV�ƽ�����ʵ���Ҽ���������������֤1000Сʱ���������������������������������ݹ��������Ѿȵ�ʵս�����������72Сʱ������ҵ���Ͽ����顣�����̡�����II�CA��AUV��ƾ����Դ�������ƽ�������˫��ͻ�ƣ�ʵ���˵�������30��ij���������Ϊ��߶Ⱥ�������۲��ṩ��ǰ��δ�еļ����ֶΡ�
����ˮ�»����˿��Ƶ�����ͨ�ż������ƽ⡰ʱ�ո�֪�Ϳ��ơ�����
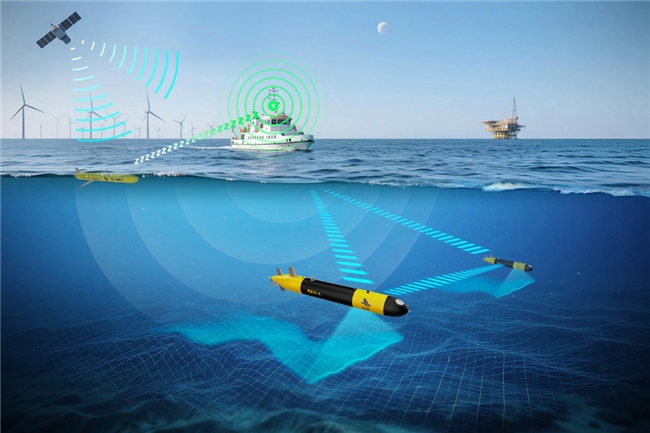
ˮ�»��������е���źų����봫�䣬GPS��ȫ������ϵͳ�ڴ˼�����ȫʧЧ�����ͨ�Ŵ����������㡣�����˱��������ⲿ�����յ������£����������˭�������ġ���Ҫȥ�ġ��ĸ������⡣ͬʱ����ѧ��ΪΨһ���е�Զ����Ϣ���壬����е�խ���������ӳ١��ྶЧӦ�������������ţ�ʹ�ø߿ɿ������ӳٵ�ˮ��ͨ���뵼����Ϊ���������⡣
��֮��������ҵ�����ص㣬ʱ�ո�֪���棬���ö�Դ�칹ʱ����Ϣ��֪�ܹ��������Բ�������ѧ�����ղ��١����̻���λ�ò����������Ӿ�������֪��Ϣ�Ƚ�������ںϣ�ʵʱ����������Ŷȵ�λ����Ϣ��ͨ�Ų��棬�Ż�ʹ��ͨ���¡���ͨ�š�����ͨ�š�4Gͨ�š����ߵ�ͨ�ŵ�ͨ�ż�����ʵ���źſɿ����䣻���˶����Ʋ��棬���ڶ��ƽ���ʸ��������ȫ��̬��������㷨�������˾�ȷ�Ķ���ѧģ�ͣ��������Կ����������Ŷ����ü�����ϵ��������֮��ROV���ļ�������ʵ�ֶ�����λ(DP)�������������Ӻ����µ���ҵ�����ڴӡ������ܡ���Ϊ�����桱��ͨ��ĸ��-AUV�칹Эͬ�����붯̬·���滮��������������õ������������������⡢�硢���ں�̽�⼼�������ں��ܵ���⡢��ˮ�Ѿȵȳ����У���Ŀ��ʶ���붨λ���ȴ��������ʵ���˴ӡ�ä̽���������족�ķ�ʽת�䡣
�ġ�ˮ�»������Ƚ����켼�������͡����˷��ۻ����µĿɿ���ʯ��
��Dz��������칤�յġ��ռ�����������װ����������൱�����ٸ�����ѹ�ľ�ѹ��(��110MPa)��������ˮ�ij����绯ѧ��ʴ�����︽�ţ�ͬʱ���µ������������ϵ�ѡ�������칤�գ�ֱ�Ӿ�����DZ����������ȡ���������������ɿ��ԡ����磬��������������ѧ�迹ƥ����ṹǿ�ȣ���ѹ������Ҫ�ߵı�ǿ����ȸնȡ�
��֮�������˴Ӳ���ѡ�͵����������ϵ�к��ļ��������ø��ϲ����������Ż��ṹ��ƣ�������������ѹϵͳ��������Ľṹ����ʵ����ǿ�Ŀ�ѹ��������֮�����ܼӹ����ľ�ͨ�ѺϽ�����ָ��ϲ��ϵľ��ܼӹ����Լ������Ӧ�ܷ�ṹ��ƣ�ȷ���豸��ȫ���Χ�ڡ���ˮ��©������֮���ɹ����Ʋ�Ӧ������ѹǿ�ȡ�110MPa��������������ѹ���壬��������ȫ����̽��Ĺؼ��������ϡ�SUBLUEˮ����������Ʒ���۳���10��̨��ϵͳ�ɿ��Եõ������֤���Ӻ�۵ij��ؿ�ܵ��۵��ܷ�Ȧ���Ƚ����켼��ȷ��������ǰ����ƹ��룬����ת��Ϊ�ڼ��˻������ȶ����ɿ������������е��������

ϵͳ���塢������Դ�����Ƶ������Ƚ����졪�����Ĵ�����ϵ���ǹ������ڣ��������ϡ�Эͬ�ݽ�����ͬ��������֮�����ɸ��Ƶĺ��ļ����뾺�����ݡ������г�Ϊ���죬�Դ���Ϊ�������Լ���Ϊ֧�ţ�������Ѷ���ȷ���¡����Դ�Ϊ��ʯ����֮��������Ϊ����ȫ�����̡�ˮ��ˮ�硢Ӧ����Ԯ������ƿ����������õȹؼ������ṩӲ�˼���֧�ţ��Լ�ʵ�ĿƼ�ʵ������������̽���뿪����ɫ����ĺ�ΰ���̡�